-

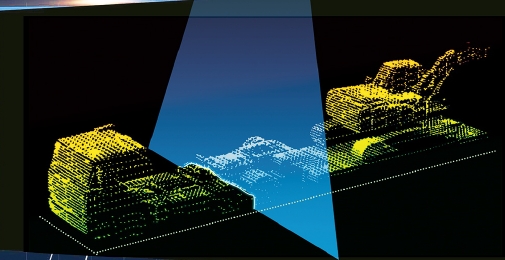
Силсилаи трафик Lidar EN-1230
Лидари силсилаи EN-1230 як лидари як хати андозагириест, ки барномаҳои дарунӣ ва беруниро дастгирӣ мекунад. Он метавонад ҷудокунандаи воситаҳои нақлиёт, дастгоҳи ченкунӣ барои контури беруна, муайянкунии баландии мошин, муайянкунии контури динамикии нақлиёт, дастгоҳи муайянкунии ҷараёни трафик ва зарфҳои муайянкунанда ва ғайра бошад.
Интерфейс ва сохтори ин маҳсулот ҳамаҷонибатаранд ва арзиши умумии хароҷот баландтар аст. Барои ҳадаф бо инъикоси 10%, масофаи самараноки андозагирии он ба 30 метр мерасад. Радар тарҳи муҳофизати дараҷаи саноатиро қабул мекунад ва барои сенарияҳои дорои эътимоднокии қатъӣ ва талаботҳои баланд ба монанди шоҳроҳҳо, бандарҳо, роҳи оҳан ва нерӯи барқ мувофиқ аст.
-

CET-2001Q Epoxy Resin Grout барои сенсорҳои кварц
CET-200Q омехтаи 3-компоненти эпоксии тағйирёфта (A: қатрон, B: агенти шифобахш, C: пуркунанда) мебошад, ки махсус барои насб ва лангари сенсорҳои динамикии кварц (санҷандаҳои WIM) тарҳрезӣ шудааст. Мақсади он пур кардани фосилаи байни чуқури пойгоҳи бетонӣ ва сенсор, таъмини дастгирии устувор барои таъмини кори дарозмуддати устувори сенсор ва дароз кардани мӯҳлати хизмати он мебошад.
-

Сенсори динамикии тарозуи пьезоэлектрики кварц CET8312
CET8312 Сенсори вазнкунии динамикии кварц пьезоэлектрикӣ дорои хусусиятҳои диапазони васеи андозагирӣ, устувории хуби дарозмуддат, такроршавандагии хуб, дақиқии баланди андозагирӣ ва басомади вокуниши баланд мебошад, аз ин рӯ он махсусан барои муайян кардани вазнҳои динамикӣ мувофиқ аст. Ин як сенсори вазнкашии сахти рахи динамикӣ мебошад, ки ба принсипи пьезоэлектрикӣ ва сохтори патентӣ асос ёфтааст. Он аз варақи булӯри кварси пьезоэлектрикӣ, плитаи электрод ва дастгоҳи махсуси чӯбдаст иборат аст. Ба хусусиятҳои андозаи 1 метр, 1,5 метр, 1,75 метр, 2 метр тақсим карда мешавад, метавонад ба андозаҳои гуногуни сенсорҳои ҳаракати роҳ муттаҳид карда шавад, метавонад ба эҳтиёҷоти динамикии вазнбардории сатҳи роҳ мутобиқ шавад.
-

Илтиёми полиуретании CET-2002P барои сенсорҳои Piezo
YD-2002P як илтиёми бе ҳалкунанда, аз ҷиҳати экологӣ тозаи сард аст, ки барои инкапсулизатсия ё пайваст кардани рӯи сенсорҳои трафики пьезо истифода мешавад.
-

Сенсори трафики пьезоэлектрикӣ барои AVC (Таснифи худкори мошин)
Сенсори интеллектуалии ҳаракати CET8311 барои насби доимӣ ё муваққатӣ дар роҳ ё зери роҳ барои ҷамъоварии маълумот дар бораи ҳаракат пешбинӣ шудааст. Сохтори беназири сенсор имкон медиҳад, ки он мустақиман дар зери роҳ дар шакли чандир васл карда шавад ва аз ин рӯ ба контури роҳ мувофиқат кунад. Сохтори ҳамвори сенсор ба садои роҳ тобовар аст, ки дар натиҷаи хам шудани сатҳи роҳ, хатҳои ҳамшафат ва мавҷҳои хамшавӣ ба мошин наздик мешаванд. Буридани хурди болои фарш вайрон шудани сатҳи роҳро кам мекунад, суръати васлкуниро зиёд мекунад ва микдори грутро барои насб кардан кам мекунад.
-

Пардаи нури инфрасурх
Минтақаи мурда озод
Сохтмони устувор
Функсияи худидоракунии ташхис
Муборизаи зидди нур -

Сепараторҳои инфрасурхи мошинҳо
Сепаратори инфрасурхи автомобилии силсилаи ENLH як дастгоҳи ҷудокунии динамикии автомобил мебошад, ки аз ҷониби Enviko бо истифода аз технологияи сканеркунии инфрасурх таҳия шудааст. Ин дастгоҳ аз интиқолдиҳанда ва қабулкунанда иборат буда, аз рӯи принсипи чӯбҳои муқобил кор мекунад, то мавҷудият ва рафтани мошинҳоро муайян кунад ва ба ин васила самараи ҷудошавии мошинҳоро ба даст меорад. Он дорои дақиқии баланд, қобилияти қавии зидди дахолат ва вокуниши баланд мебошад, ки онро дар сенарияҳо ба монанди истгоҳҳои умумии пулакӣ, системаҳои ETC ва системаҳои вазн дар ҳаракат (WIM) барои ҷамъоварии пул дар роҳи автомобилгард дар асоси вазни мошин васеъ татбиқ мекунад.
-

Дастурҳои идоракунии системаи Wim
Enviko Wim Data Logger (Назораткунанда) маълумоти сенсори тарозуи динамикӣ (кварц ва пьезоэлектрикӣ), кати сенсори замин (детектори анҷоми лазерӣ), идентификатори меҳвар ва сенсори ҳароратро ҷамъоварӣ мекунад ва онҳоро ба маълумоти пурраи мошин ва маълумоти вазн, аз ҷумла навъи тир, рақами тир, пойгоҳи чарх, рақами шина, вазн, вазни умумии меҳвар ва ғайра коркард мекунад. идентификатори навъи мошин ва идентификатори тири берунӣ ва система ба таври худкор мувофиқат мекунад, то маълумотро дар бораи боргузорӣ ё нигоҳдории маълумот дар бораи автомобил бо мушаххасоти навъи мошин ташкил диҳад.
-

CET-DQ601B пурқувваткунандаи барқ
Баландкунандаи барқи Enviko як пуркунандаи барқи каналест, ки шиддати баромади он ба заряди вуруд мутаносиб аст. Он бо сенсорҳои пьезоэлектрикӣ муҷаҳҳаз буда, метавонад шитоб, фишор, қувва ва дигар миқдори механикии объектҳоро чен кунад.
Он ба таври васеъ дар ҳифзи об, энергетика, истихроҷи маъдан, нақлиёт, сохтмон, заминҷунбӣ, аэрокосмос, силоҳ ва дигар шӯъбаҳо истифода мешавад. Ин асбоб хусусияти зерин дорад. -

Муайянкунандаи тири бе тамос
Муқаддима Системаи интеллектуалии муайянкунии тири меҳвари бидуни тамос ба таври худкор шумораи меҳварҳоро тавассути сенсорҳои муайянкунии тири автомобил, ки дар ҳар ду тарафи роҳ насб карда шудаанд, эътироф мекунад ва ба компютери саноатӣ сигнали мушаххаси мувофиқ медиҳад; Тарҳрезии нақшаи татбиқи системаи назорати борбардорӣ, аз қабили муоинаи пешакии даромадгоҳ ва истгоҳи изофӣ; ин система метавонад рақамро дақиқ муайян кунад ... -

Дастури AI
Дар асоси платформаи таҳияи алгоритми тасвири омӯзиши амиқ, ки технологияи баландсифати чипи ҷараёни маълумот ва технологияи рӯъёи AI муттаҳид карда шудааст, то дақиқии алгоритмро таъмин кунад; система асосан аз як идентификатори тири AI ва мизбони идентификатсияи тири AI иборат аст, ки барои муайян кардани шумораи меҳварҳо, Маълумот дар бораи мошин ба монанди навъи тир, чархҳои ягона ва дугона истифода мешаванд. Хусусиятҳои система 1). мушаххаскунии дақиқ Метавонад рақамро дақиқ муайян кунад... -

Акселерометри пьезоэлектрикӣ CJC3010
CJC3010 Мушаххасоти Хусусиятҳои ДИНАМИКӢ CJC3010 Ҳассосият (±10%) 12pC/g Гайрихаттӣ ≤1% Ҷавоби басомад (±5%;X-меҳвари,Y-меҳвар) 1~3000Гц аксуламали басомад (±5%) 1~6000Гц басомади резонанси (X-меҳвари,Y-меҳвари) 14КГц басомади резонанси (X-меҳвари,Y-меҳвари) 28КГс ҳассосияти трансверсивӣ ≤5% ХУСИЯТҲОИ ЭЛЕКТРӢ Муқовимат Ω0G0p G0Gping Изолятсия ХУСУСИЯТҲОИ муҳитӣ Диапазони ҳарорат...

-

Телефон
-

Почтаи электронӣ
-

Whatsapp
Whatsapp

-

боло