
Сенсори динамикии тарозуи пьезоэлектрики кварц CET8312


Тавсифи кӯтоҳ:
CET8312 Сенсори вазнкунии динамикии кварц пьезоэлектрикӣ дорои хусусиятҳои диапазони васеи андозагирӣ, устувории хуби дарозмуддат, такроршавандагии хуб, дақиқии баланди андозагирӣ ва басомади вокуниши баланд мебошад, аз ин рӯ он махсусан барои муайян кардани вазнҳои динамикӣ мувофиқ аст. Ин як сенсори вазнкашии сахти рахи динамикӣ мебошад, ки ба принсипи пьезоэлектрикӣ ва сохтори патентӣ асос ёфтааст. Он аз варақи булӯри кварси пьезоэлектрикӣ, плитаи электрод ва дастгоҳи махсуси чӯбдаст иборат аст. Ба хусусиятҳои андозаи 1 метр, 1,5 метр, 1,75 метр, 2 метр тақсим карда мешавад, метавонад ба андозаҳои гуногуни сенсорҳои ҳаракати роҳ муттаҳид карда шавад, метавонад ба эҳтиёҷоти динамикии вазнбардории сатҳи роҳ мутобиқ шавад.
Тафсилоти маҳсулот
Параметрҳои техникӣ
| Андозаҳои бахш | (48мм+58мм)*58мм | ||
| Дарозӣ | 1м, 1,5м, 1,75м, 2м | ||
| Диапазони вазн кардани чархҳо | 0.05T ~ 40T | ||
| Иқтидори изофабори | 150% FS | ||
| Ҳассосияти бор | 2±5%pC/N | ||
| Диапазони суръат | (0,5-200)км/соат | ||
| Дараҷаи муҳофизат | IP68 | Импеданси баромад | >1010 Ом |
| Ҳарорати корӣ. | -45 ~ 80 ℃ | Таъсири ҳарорати баромад | <0,04% FS/ ℃ |
| Пайвастагии барқ | Сими коаксиалии садои статикии басомади баланд | ||
| Сатҳи подшипник | Сатҳи подшипник метавонад сайқал дода шавад | ||
| ғайрихаттӣ | ≤±2% FS (дақиқии калибрченкунии статикии сенсорҳо дар ҳар як нуқта) | ||
| Мутобиқати | ≤±4% FS (дақиқии калибрченкунии статикии нуқтаҳои мавқеи гуногуни сенсор) | ||
| Такрори такрорӣ | ≤±2% FS (дақиқии калибровкаи статикии сенсорҳо дар як мавқеъ) | ||
| Хатогии дақиқи интегралӣ | ≤±5% | ||
Усули насб
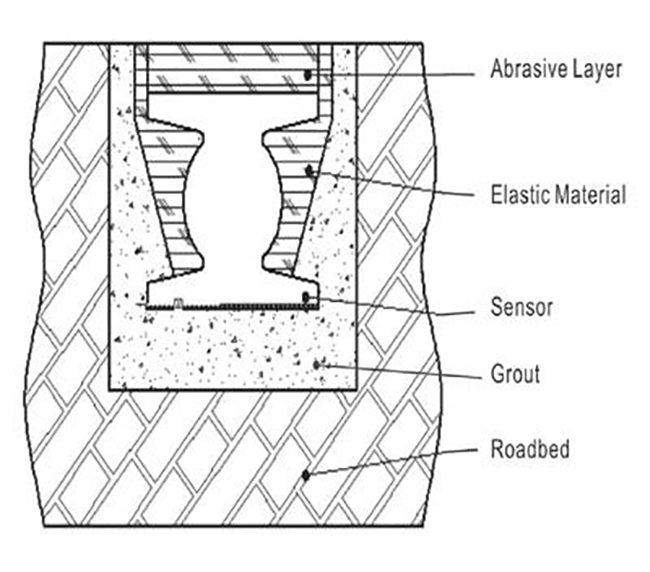
Сохтори умумӣ
Барои таъмини таъсири санҷиши тамоми насби сенсор, интихоби сайт бояд сахт бошад. Пешниҳод карда мешавад, ки фаршҳои сахти сементиро ҳамчун асоси насби сенсор интихоб карда, фарши чандир ба мисли асфалт ислоҳ карда шавад. Дар акси ҳол, ба дурустии андозагирӣ ё мӯҳлати хидматрасонии сенсор метавонад таъсир расонад.
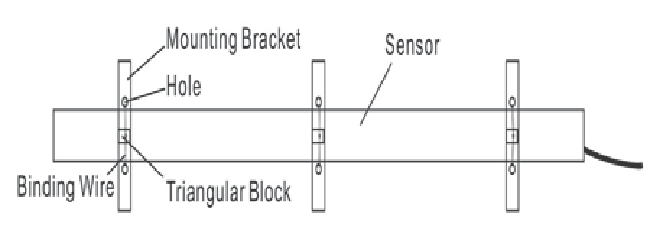

Кронштейн васлкунӣ
Пас аз муайян кардани ҷойгиршавӣ, кронштейн васлкуниро бо сӯрохиҳои бо сенсорҳо таъминшуда бояд ба сенсор бо лентаи сими дарозтар васл карда шавад ва сипас як пораи хурди секунҷаи чӯбро барои васл кардан ба фосилаи байни тасмаи бастабандӣ ва кронштейн васлкунӣ истифода мешавад, то ки он мустаҳкам карда шавад. Агар қувваи корӣ кофӣ бошад, қадамҳои (2) ва (3) метавонанд ҳамзамон иҷро карда шаванд. Чунон ки дар боло нишон дода шудааст.
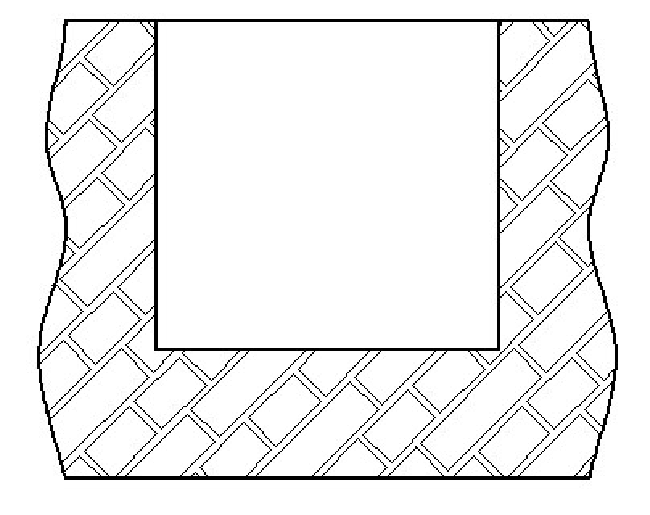
Кандани фарш
Барои муайян кардани мавқеъи васлкунии сенсори динамикии вазнченкунӣ аз ченак ё асбоби дигар истифода баред. Мошини буридан барои кушодани чуқуриҳои росткунҷа дар роҳ истифода мешавад.
Агар чукурхо нобаробар буда, дар канори чукурхо куракхои хурд дошта бошанд, пахнои чукурхо назар ба датчик 20 миллиметр, чукурии чукурхо назар ба сенсор 20 миллиметр ва нисбат ба датчик 50 миллиметр зиёд аст. Чуқури кабелӣ бараш 10 мм, чуқурии 50 мм;
Агар чукурхо бодиккат сохта шуда, канори чукурхо хамвор бошад, пахнои чукурхо назар ба датчикхо 5—10 миллиметр, чукурии чукурхо назар ба датчикхо 5—10 миллиметр ва дарозии чукурхо назар ба датчикхо 20—50 миллиметр зиёд мешавад. Чуқури кабелӣ 10 мм васеъ, 50 мм чуқур аст.
Поёнро тарошида, лой ва оби ҷӯйҳоро бо насоси ҳавоӣ тоза кардан (барои пур кардани ҷӯякҳо бодиққат хушк кардан) ва сатҳи болоии ҳар ду тарафи чуқуриро бо лента васл кардан лозим аст.
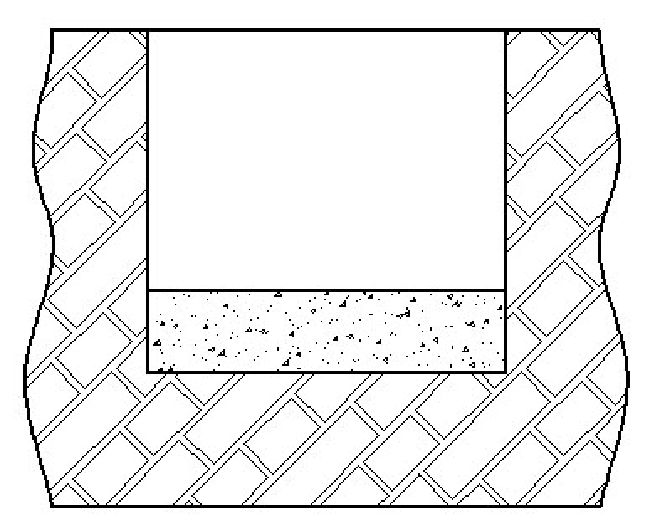
Боргирии аввал
Гирифтани васлкуниро аз рӯи таносуби муқарраршуда кушоед, ки омехтаи омехтаро омода созед, бо асбобҳо зуд омехта кунед ва сипас ба таври баробар ба самти дарозии чуқурӣ рехт, аввалин пуркунии чуқури бояд камтар аз 1/3 чуқурии чуқурӣ бошад.
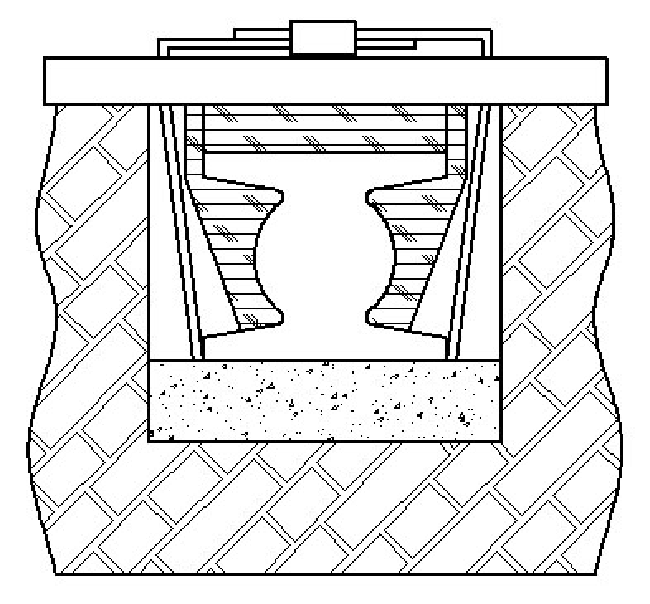
Ҷойгиркунии сенсор
Датчикро бо кронштейн васлкунӣ ба сӯрохии пур аз грут оҳиста ҷойгир кунед, кронштейн васлкуниро танзим кунед ва ҳар як такя ба сатҳи болоии слот ламс кунед ва боварӣ ҳосил кунед, ки сенсор дар маркази слот ҷойгир аст. Вақте ки ду ё зиёда сенсорҳо дар як слот насб карда мешаванд, бояд ба қисми пайвастшавӣ диққати махсус дода шавад.
Сатҳи болоии ду датчик бояд дар як сатҳи уфуқӣ бошад ва пайванд бояд то ҳадди имкон хурд бошад, вагарна хатогии андозагирӣ ба вуҷуд меояд. Дар қадами (4) ва (5) ҳарчи бештар вақтро сарфа кунед, вагарна хок шифо меёбад (1-2 соат вақти муқаррарии ширеши мо).
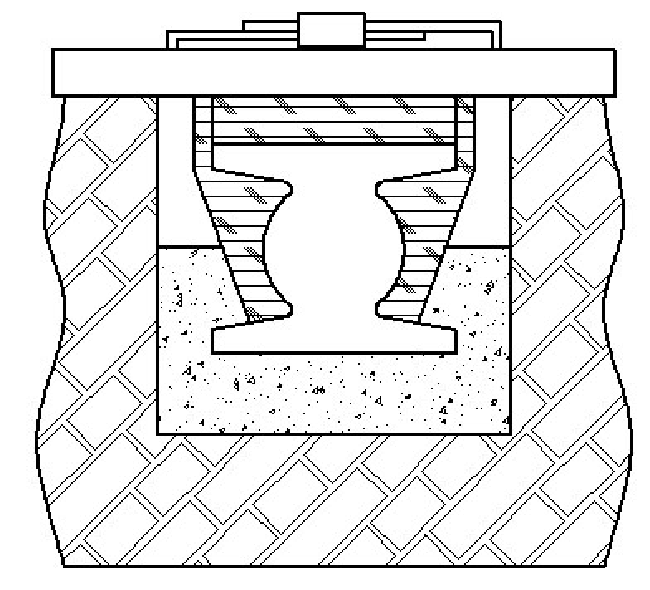
Хориҷ кардани кронштейн васлкунӣ ва хокаи дуюм
Пас аз он ки грут асосан шифо ёфт, таъсири аввалини насби сенсорро мушоҳида кунед ва агар лозим бошад, онро сари вақт танзим кунед. Ҳама чиз асосан омода аст, пас кронштейнро бардоред ва бориккунии дуюмро давом диҳед. Ин тазриқ бо баландии сатҳи сенсор маҳдуд аст.
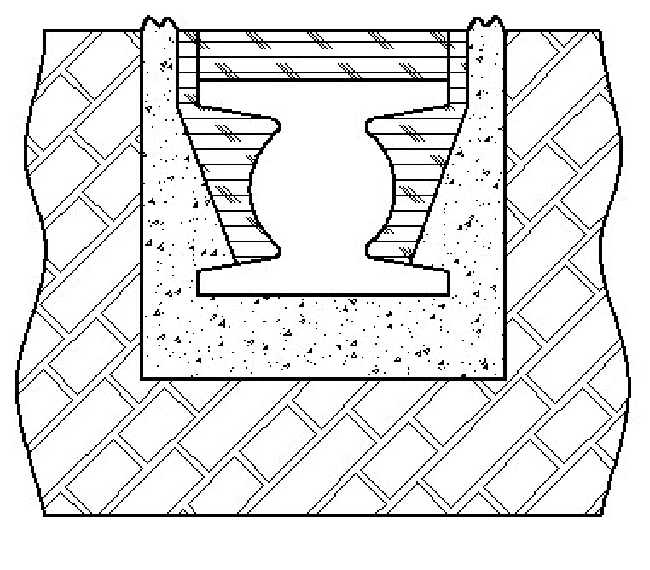
Дафъаи саввум пошидан
Дар давраи муолича хар вакт ба зиёд кардани микдори хок диккат дихед, то ки сатхи умумии хок баъди пур кардан аз сатхи рох каме баландтар бошад.
Суфтакунии рӯизаминӣ
Пас аз он ки ҳама порчаи насбкунӣ ба қувваи муолиҷа расид, лентаро канда, сатҳи чуқурӣ ва сатҳи роҳро майда кунед, бо мошини стандартӣ ё дигар мошинҳо озмоиши боркуниро гузаронед, то дуруст будани насби сенсорро тафтиш кунед.
Агар санҷиши пешакӣ муқаррарӣ бошад, насб аст
анҷом ёфт.
Огоҳӣ оид ба насб
5.1 Истифодаи сенсор берун аз ҳудуди ва ҳарорати корӣ барои муддати тӯлонӣ қатъиян манъ аст.
5.2 Андозагирии муқовимати изолятсияи сенсор бо метри муқовимати баланд аз 1000 В ба таври қатъӣ манъ аст.
5.3 Санҷиши он ба кормандони ғайрикасбӣ қатъиян манъ аст.
5.4 Воситаи ченкунӣ бояд бо маводи алюминий мувофиқ бошад, вагарна ҳангоми фармоиш дастурҳои махсус лозиманд.
5.5 Охири баромади сенсори L5/Q9 ҳангоми ченкунӣ бояд хушк ва тоза нигоҳ дошта шавад, вагарна баромади сигнал ноустувор аст.
5.6 Сатҳи фишори сенсор набояд бо асбоби кунд ё қувваи вазнин зада шавад.
5.7 Паҳнои фарохмаҷрои пурқувваткунандаи барқ бояд нисбат ба сенсор баландтар бошад, ба истиснои талаботи махсус барои аксуламал ба басомад вуҷуд надорад.
5.8 Насб кардани сенсорҳо бояд ба таври қатъӣ мувофиқи талаботи дахлдори дастурҳо барои ноил шудан ба андозагирии дақиқ анҷом дода шаванд.
5.9 Агар дар наздикии ченак дахолати сахти электромагнитӣ мавҷуд бошад, бояд чораҳои муайяни муҳофизатӣ андешида шаванд.
5.10 Сими сенсор ва пурқувваткунандаи барқ бояд сими коаксиалиро бо садои статикии басомади баланд истифода барад.
Замимаҳо
Дастур 1 PCS
Шаҳодатномаи санҷиш 1 PCS Шаҳодатнома 1 PCS
Нишондиҳандаи 1 PCS
Сими баромади Q9 1 PCS
Enviko зиёда аз 10 сол дар системаҳои вазн дар ҳаракат тахассус дорад. Сенсорҳои WIM ва дигар маҳсулоти мо дар саноати ITS ба таври васеъ эътироф шудаанд.









