
Бо афзоиши талабот ба мониторинги сарбории роҳҳо ва пулҳо дар идоракунии муосири ҳаракати нақлиёт, технологияи Weigh-In-Motion (WIM) як воситаи муҳими идоракунии ҳаракати нақлиёт ва ҳифзи инфрасохтор гардид. Маҳсулоти сенсорҳои кварции Enviko бо иҷрои аъло ва эътимоднокии онҳо дар системаҳои WIM васеъ истифода мешаванд.
Принсипҳои Алгоритмҳои Кварц Тарозуи Ҳаракат (WIM).
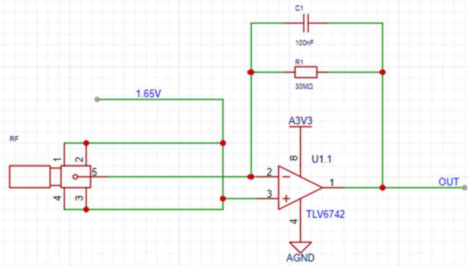
Асоси системаи кварц Weigh-In-Motion (WIM) аз чен кардани фишори ба сатҳи роҳ тавассути воситаҳои нақлиёт дар вақти воқеӣ бо истифода аз сенсорҳои кварси дар роҳ насбшуда иборат аст. Сенсорҳои кварц эффекти пьезоэлектрикиро барои табдил додани сигналҳои фишор ба сигналҳои электрикӣ истифода мебаранд. Ин сигналҳои барқӣ тақвият, филтр ва рақамӣ карда мешаванд, ки дар ниҳоят барои ҳисоб кардани вазни мошин истифода мешаванд.
Сенсорҳои кварции Enviko, ки дар системаҳои WIM истифода мешаванд, дорои ҳассосияти баланд ва хусусиятҳои вокуниш ба басомади васеъ мебошанд, ки ба онҳо имкон медиҳанд, ки тағироти фишори фаврӣ ҳангоми аз болои онҳо гузаштани мошинҳо дақиқ сабт кунанд. Илова бар ин, сенсорҳои кварц устувории аълои ҳарорат ва умри дароз доранд ва кори мӯътадилро дар муҳитҳои гуногуни сахт нигоҳ медоранд.
Қадамҳои алгоритми вазн дар ҳаракат (WIM).
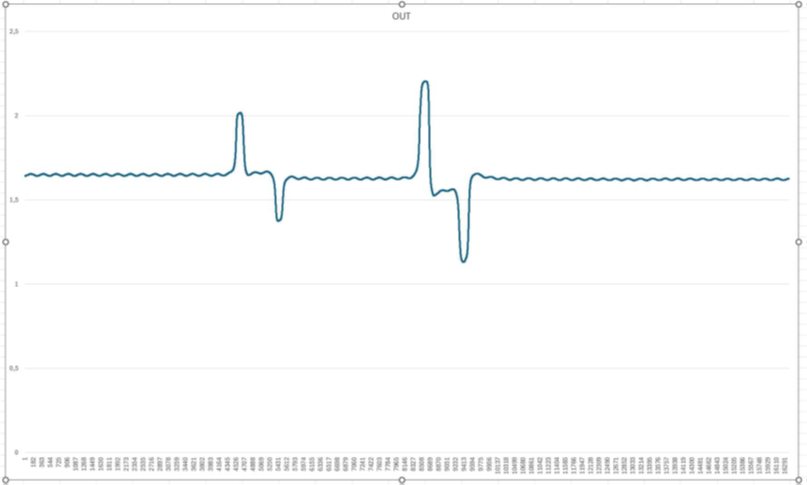
1.Гирифтани сигнал: Сигналҳои фишореро, ки тавассути мошинҳои гузаранда бо истифода аз сенсорҳои кварцӣ ба амал меоянд, сабт кунед, ин сигналҳоро ба сигналҳои электрикӣ табдил диҳед ва онҳоро ба системаи ҷамъоварии маълумот интиқол диҳед.
2.Баланд бардоштани сигнал ва филтркунӣ: Сигналҳои барқии бадастомадаро пурзӯр кунед ва филтр кунед, то садо ва халалҳоро нест кунед ва маълумоти муфидро дар бораи вазн нигоҳ доред.
3.Рақамсозии маълумот: Табдил додани сигналҳои аналогӣ ба сигналҳои рақамӣ барои коркард ва таҳлили минбаъда.
4.Ислоҳи ибтидоӣ: Ислоҳи ибтидоиро дар сигналҳо иҷро кунед, то ҷуброни сифрии сарбориро бартараф созед ва дақиқии андозагириро таъмин кунед.
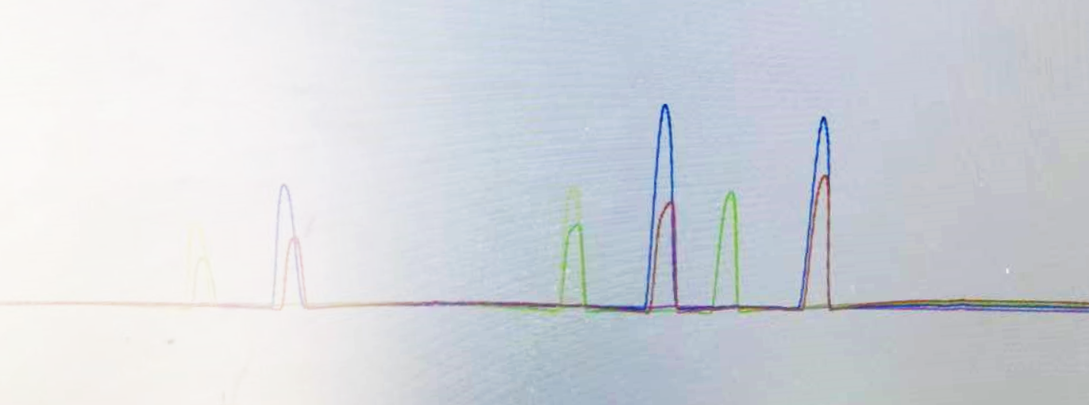
5.Коркарди ҳамгироӣ: Сигналҳои ислоҳшударо бо мурури замон муттаҳид кунед, то маблағи умумиро ҳисоб кунед, ки он ба вазни мошин мутаносиб аст.
6.Калибрченкунӣ: Барои табдил додани заряди умумӣ ба арзишҳои вазни воқеӣ омилҳои калибркунии пешакӣ муайяншударо истифода баред.
7.Ҳисобкунии вазн: Агар сенсорҳои сершумор истифода шаванд, вазнҳои ҳар як сенсорро ҷамъ кунед, то вазни умумии мошинро ба даст оред.
Муносибати байни алгоритмҳо ва дақиқӣ
Дурустии системаи Weigh-In-Motion (WIM) бештар аз алгоритмҳои истифодашуда вобаста аст. Сенсорҳои кварси Enviko дурустии андозагирии вазнро тавассути ба даст овардани сигнал ва коркарди дақиқи баланд таъмин мекунанд. Дақиқӣ ва самаранокии алгоритмҳои коркарди маълумот бевосита ба натиҷаҳои ниҳоии вазн таъсир мерасонанд. Алгоритмҳои пешрафтаи коркарди сигнал ва таҳлили маълумот метавонанд дақиқии вазнро ба таври муассир беҳтар созанд ва хатогиҳои андозагириро кам кунанд.
Махсусан, дақиқии ба даст овардани сигнал, самаранокии филтркунии садо ва дақиқии равандҳои ҳамгироӣ ва калибрченкунӣ омилҳои калидӣ мебошанд, ки ба дақиқии вазн таъсир мерасонанд. Сенсорҳои кварции Enviko дар ин соҳаҳо бартарӣ доранд ва дақиқӣ ва эътимоднокии системаҳои WIM-ро тавассути алгоритмҳои пешрафта ва сахтафзори баландсифат таъмин мекунанд.
Муносибати байни насб ва дақиқ

Мавқеи насб ва усули сенсорҳои кварц ба дақиқии ченкунии системаи WIM таъсир мерасонад. Датчикҳо бояд дар мавқеъҳои калидии роҳи мошин насб карда шаванд, то ки тағироти ҳадди аксар фишорро дақиқ сабт кунанд. Ҳангоми насб, алоқаи зичи байни сенсорҳо ва сатҳи роҳро таъмин кардан муҳим аст, то аз хатогиҳои андозагирӣ дар натиҷаи насби нодуруст пешгирӣ карда шавад.
Илова бар ин, омилҳои муҳити зист ба монанди ҳарорат, намӣ ва ҳамвории замин низ метавонанд ба кор ва дақиқии андозагирии сенсор таъсир расонанд. Ҳарчанд сенсорҳои кварции Enviko устувории аълои ҳарорат доранд, барои таъмини натиҷаҳои дақиқи андозагирӣ чораҳои ҷуброни мувофиқ дар шароити ҳарорати шадид лозиманд.
Калибрченкунӣ ва нигоҳдории мунтазам барои таъмини кори дарозмуддати сенсорҳо муҳим аст. Тавассути насб ва нигоҳдории касбӣ, кори сенсорҳои кварси Enviko метавонад ба ҳадди аксар расонида шавад, ки маълумоти дақиқ ва боэътимоди вазнҳои динамикӣ (WIM) -ро таъмин мекунад.
Хулоса
Татбиқи сенсорҳои кварси Enviko дар системаҳои динамикӣ вазнбардорӣ (WIM) ҳалли муассир ва боэътимодро барои идоракунии трафик ва ҳифзи инфрасохтор пешниҳод мекунад. Тавассути ба даст овардани сигналҳои дақиқ, коркарди алгоритми пешрафта ва насб ва нигоҳдории касбӣ, системаҳои вазнкашии динамикӣ (WIM) метавонанд дар вақти воқеӣ мониторинг ва идоракунии вазни мошинро ба даст оранд, фарсудашавии роҳҳо ва купрукҳоро самаранок коҳиш дода, самаранокии идоракунии ҳаракатро беҳтар созанд. Бо пешрафтҳои пайвастаи технологӣ, сенсорҳои кварцӣ Enviko дар системаҳои WIM нақши торафт муҳим бозида, барои рушди ҳамлу нақли интеллектуалӣ заминаи мустаҳкам фароҳам меоранд.

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Идораи Ченгду: № 2004, Воҳиди 1, Бинои 2, № 158, кӯчаи Тянфу 4, Минтақаи баландтехнологӣ, Ченгду
Дафтари Ҳонконг: 8F, бинои Cheung Wang, 251 Street San Wui, Гонконг
Вақти фиристодан: 07-07-2024




