

Шарҳи система
Системаи назорати тарозуи бефосила пеш аз ҳама вазифаҳои барномаҳои тиҷорӣ барои стансияҳои муайянкунии изофабории собит дар канори роҳро таъмин мекунад. Он асосан усулҳои татбиқи бидуни тамосро қабул мекунад, ки ба таҷҳизоти пеш аз санҷиш барои анҷом додани ошкор ва вазн кардани воситаҳои нақлиёти боркаш такя мекунад. Система метавонад иттилооти изофабориро нашр кунад ва маълумоти рӯйхати сиёҳро тавассути лавҳаҳои паёмнависии тағйирёбанда интишор кунад ва равандҳои тиҷоратиро тавассути нармафзори истгоҳи муайянкунии изофабори собит дар канори роҳ ба таври рақамӣ идора мекунад.
Тарҳбандии маъмулӣ
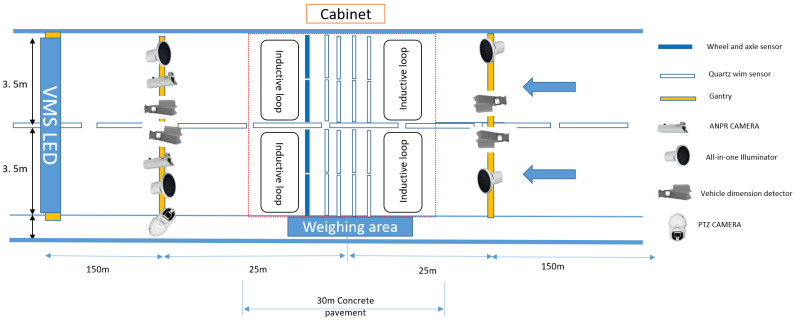
Тавсифи функсия
●Барои мошинҳое, ки аз хатти асосии шоҳроҳ мегузаранд, системаи тарозу метавонад ба таври худкор вазни умумии мошин, вазни тир, шумораи меҳварҳо ва шинаҳо, масофаи тир, суръати мошин ва суръатбахшии мошинро муайян кунад.
●Система метавонад воситаҳои нақлиётро дақиқ ва муассир ҷудо кунад ва шароити ғайримуқаррарии ронандагӣ, аз қабили навбатдории мошин ва тағир додани хатро идора кунад, ки мукотибаи байни мошинҳо ва маълумотро таъмин кунад.
●Система дорои функсияи буферии худкор буда, ба он имкон медиҳад, ки миқдори муайяни маълумотро нигоҳ дорад. Агар интиқоли маълумот ба компютери изофабори канори роҳ ноком шавад, система метавонад маълумотро дубора ирсол кунад, ки ягонагӣ ва якпорчагии маълумотро таъмин мекунад.
●Маълумоти вазнро ба компютери идоракунии пуштибон тавассути интерфейси додаҳои муайян интиқол додан мумкин аст.
●Система дорои функсияи худшиносии хато аст ва ҳангоми рух додани ягон таҷҳизот ё нокомии хат, система метавонад маълумоти мувофиқро дар бораи хатогиҳо ба даст орад.
●Система метавонад эҳтиёҷоти кори бефосила, муттасил ва дар ҳама обу ҳаворо дар ҳолати беназорат қонеъ гардонад.
●Барои мошинҳои нимприцеп бо рақамҳои номувофиқи пеш ва пас, система таҷҳизоти пуштибонии мошинро барои гирифтани ҳам рақами пеш ва ҳам рақами трейлер илова мекунад.
●Система метавонад ду тасвири панорамии хусусияти мошинҳои изофаборро (аз он ҷумла намуди пурраи мошин, рақами давлатӣ, ранг, модел ва хусусиятҳои намоёни ҷуғрофӣ) сабт кунад.
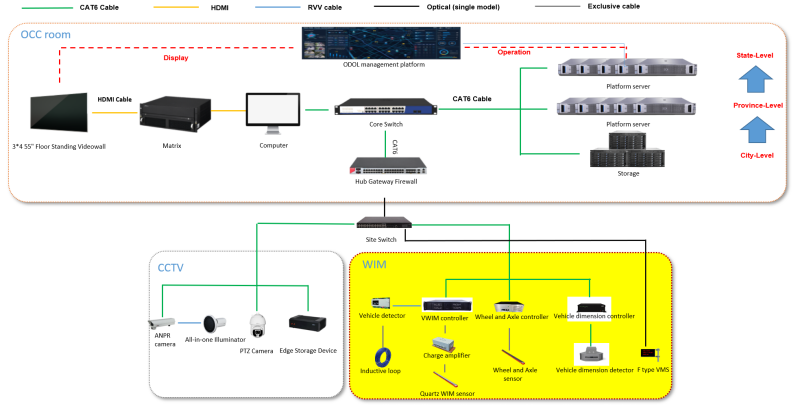
Унсурҳои система
Системаи иҷрои тарозуи беист аз системаи тарозуи динамикии баландсуръат, системаи ҷудокунии воситаҳои нақлиёт, системаи шинохти воситаҳои нақлиёт, системаи назорати видеоии канори роҳ, системаи паҳнкунии иттилоот дар канори роҳ ва системаи интиқоли иттилоот дар канори роҳ иборат аст.
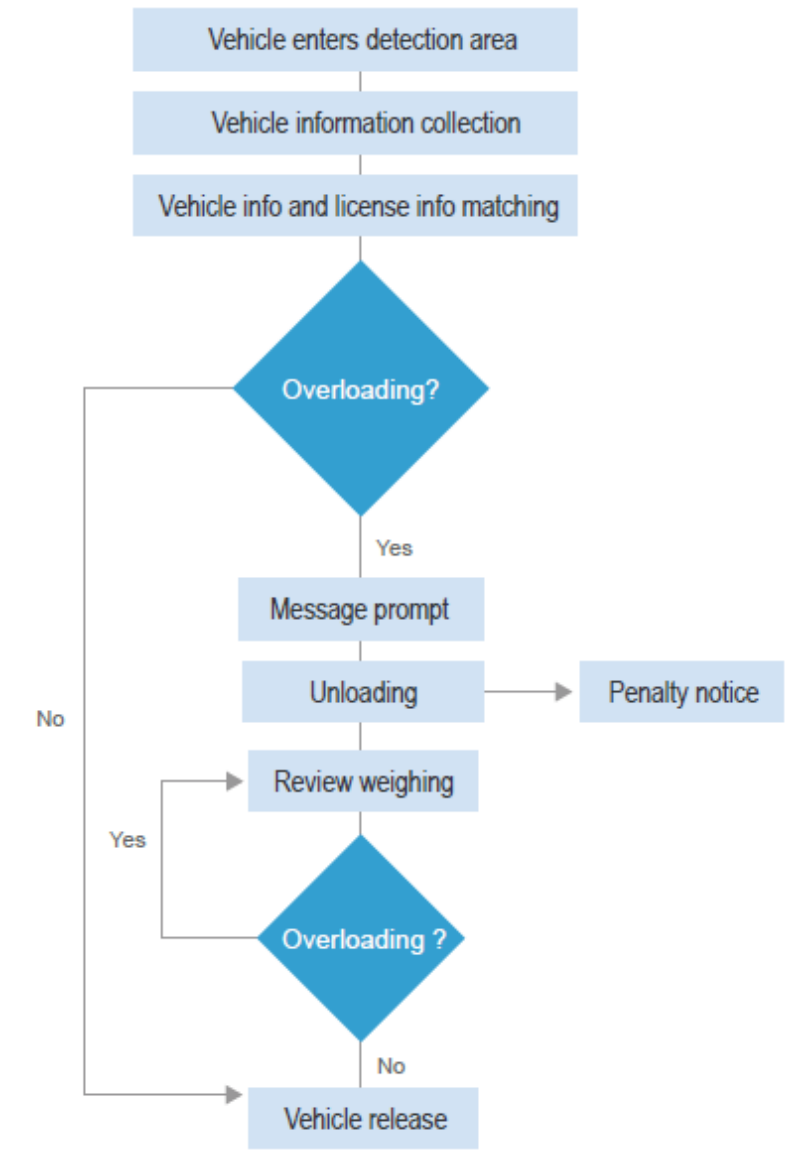
Диаграммаи равандҳои иҷроиш бидуни таваққуф
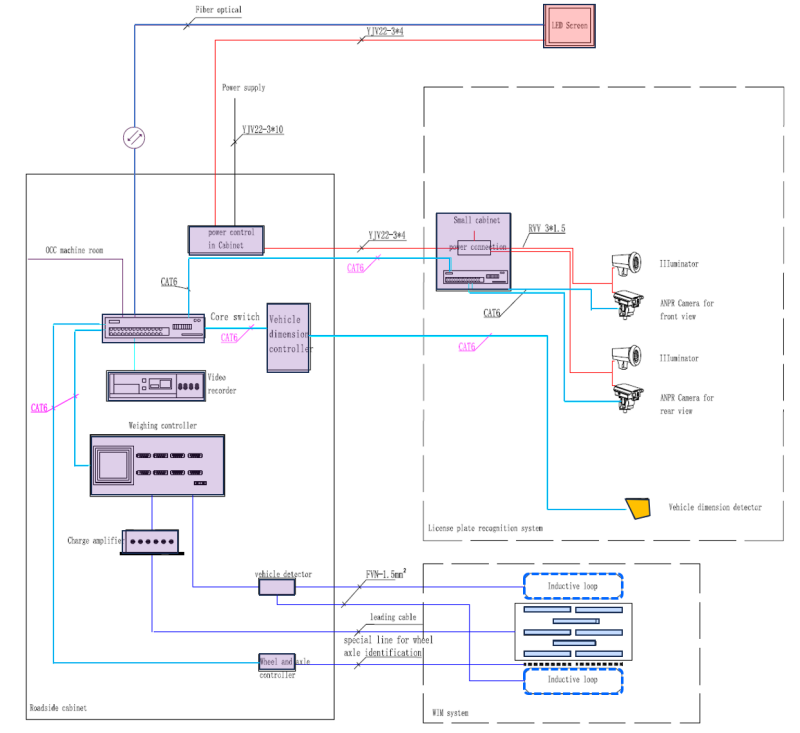
Диаграммаи топологияи система
Нишондиҳандаҳои асосии техникӣ
●Сарбории максималии тир (ё гурӯҳи тир): 40 000 кг
●Сарбории ҳадди ақали тир (ё гурӯҳи тир): 500 кг
●Арзиши хатмкунӣ: 50 кг
●Дипазони суръати муайянкунии динамикӣ: 0,5–200 км/соат
●Дараҷаи динамикии вазн: Синфи 5
●Меъёри сабти рақами рақами рӯзона: ≥98%
●Меъёри гирифтани рақами рақами шабона: ≥95%
●Шинохтани лавҳаи иҷозатнома ва дақиқии мувофиқати вазн: ≥99%

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Идораи Ченгду: № 2004, Воҳиди 1, Бинои 2, № 158, кӯчаи Тянфу 4, Минтақаи баландтехнологӣ, Ченгду
Дафтари Ҳонконг: 8F, бинои Cheung Wang, 251 Street San Wui, Гонконг
Вақти фиристодан: сентябр-13-2024




